Poster
Phone2Proc: Bringing Robust Robots Into Our Chaotic World
Matt Deitke · Rose Hendrix · Ali Farhadi · Kiana Ehsani · Aniruddha Kembhavi
West Building Exhibit Halls ABC 137
{kind=link}
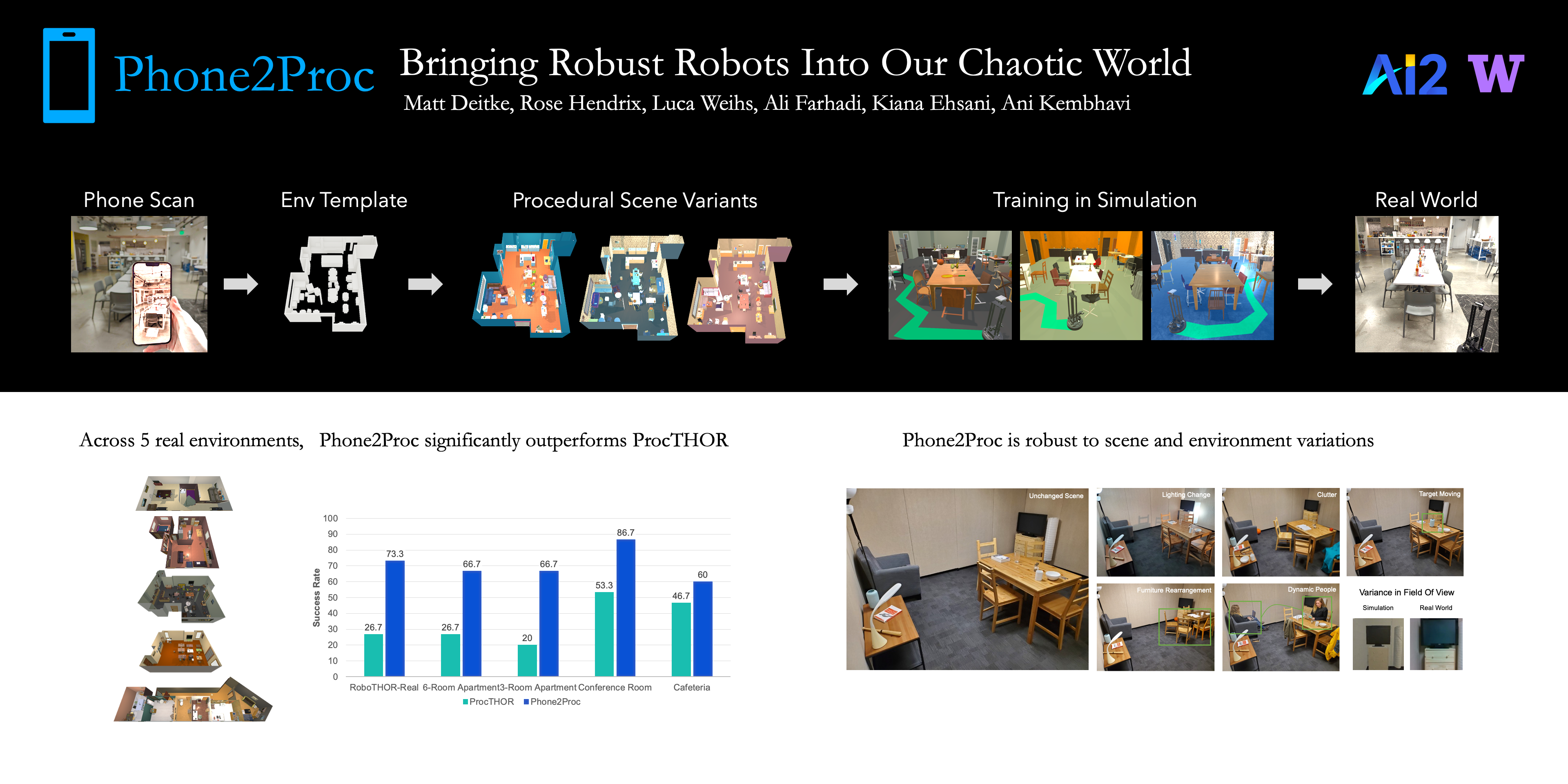
Training embodied agents in simulation has become mainstream for the embodied AI community. However, these agents often struggle when deployed in the physical world due to their inability to generalize to real-world environments. In this paper, we present Phone2Proc, a method that uses a 10-minute phone scan and conditional procedural generation to create a distribution of training scenes that are semantically similar to the target environment. The generated scenes are conditioned on the wall layout and arrangement of large objects from the scan, while also sampling lighting, clutter, surface textures, and instances of smaller objects with randomized placement and materials. Leveraging just a simple RGB camera, training with Phone2Proc shows massive improvements from 34.7% to 70.7% success rate in sim-to-real ObjectNav performance across a test suite of over 200 trials in diverse real-world environments, including homes, offices, and RoboTHOR. Furthermore, Phone2Proc’s diverse distribution of generated scenes makes agents remarkably robust to changes in the real world, such as human movement, object rearrangement, lighting changes, or clutter.