Poster
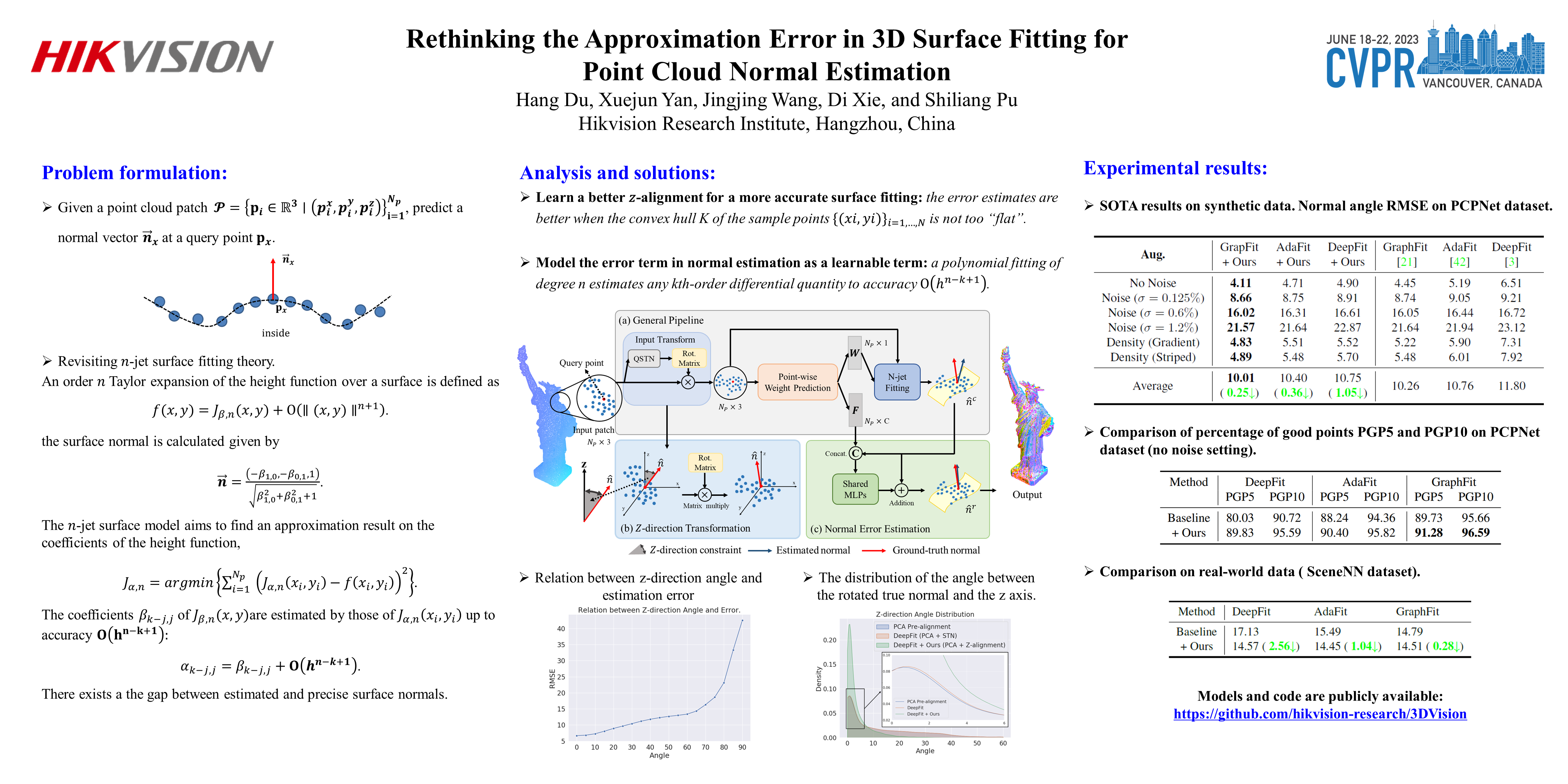
Rethinking the Approximation Error in 3D Surface Fitting for Point Cloud Normal Estimation
Hang Du · Xuejun Yan · Jingjing Wang · Di Xie · Shiliang Pu
West Building Exhibit Halls ABC 120
{kind=link}
Most existing approaches for point cloud normal estimation aim to locally fit a geometric surface and calculate the normal from the fitted surface. Recently, learning-based methods have adopted a routine of predicting point-wise weights to solve the weighted least-squares surface fitting problem. Despite achieving remarkable progress, these methods overlook the approximation error of the fitting problem, resulting in a less accurate fitted surface. In this paper, we first carry out in-depth analysis of the approximation error in the surface fitting problem. Then, in order to bridge the gap between estimated and precise surface normals, we present two basic design principles: 1) applies the Z-direction Transform to rotate local patches for a better surface fitting with a lower approximation error; 2) models the error of the normal estimation as a learnable term. We implement these two principles using deep neural networks, and integrate them with the state-of-the-art (SOTA) normal estimation methods in a plug-and-play manner. Extensive experiments verify our approaches bring benefits to point cloud normal estimation and push the frontier of state-of-the-art performance on both synthetic and real-world datasets. The code is available at https://github.com/hikvision-research/3DVision.