Poster
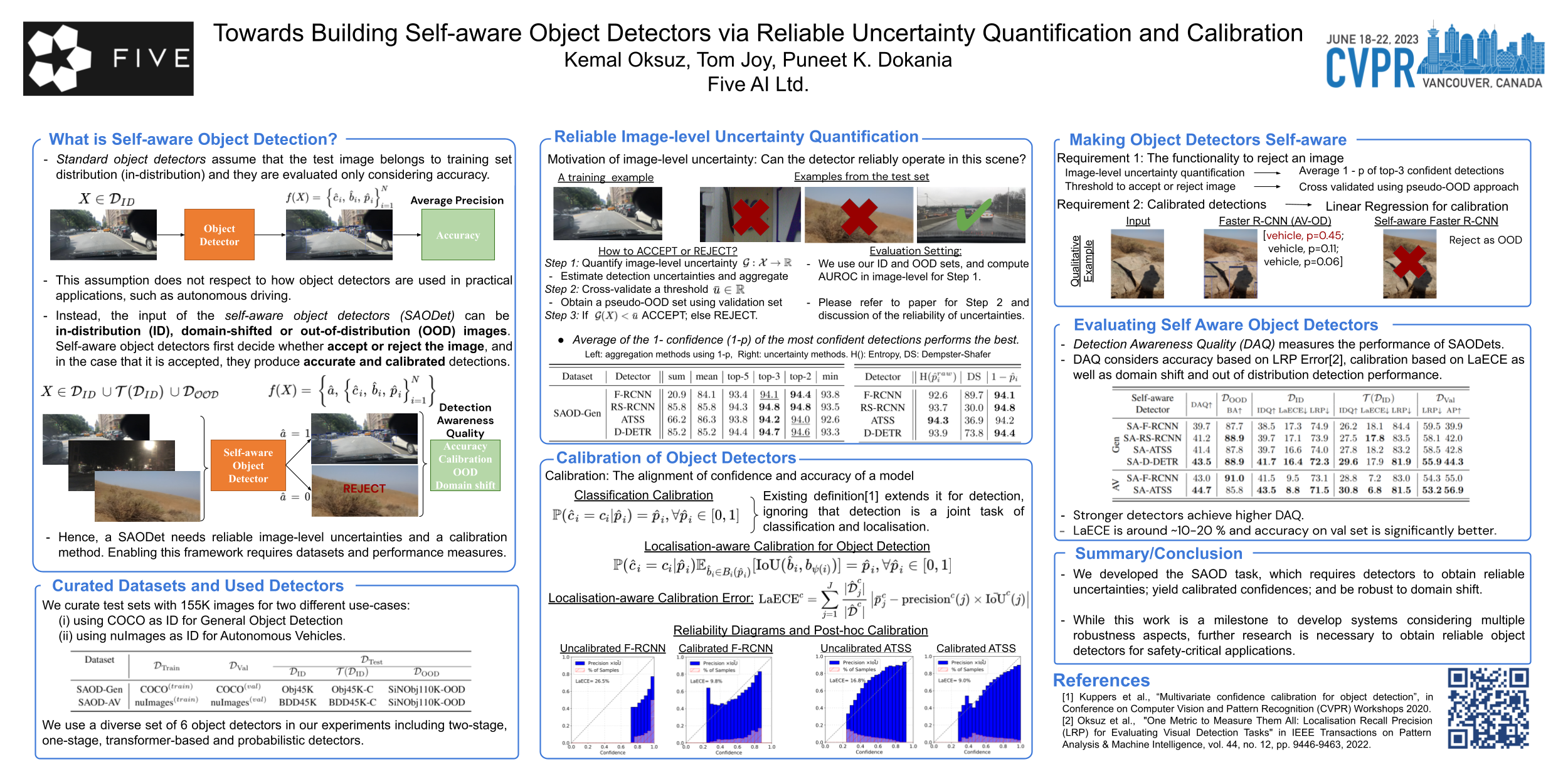
Towards Building Self-Aware Object Detectors via Reliable Uncertainty Quantification and Calibration
Kemal Oksuz · Tom Joy · Puneet K. Dokania
West Building Exhibit Halls ABC 099
{kind=link}
The current approach for testing the robustness of object detectors suffers from serious deficiencies such as improper methods of performing out-of-distribution detection and using calibration metrics which do not consider both localisation and classification quality. In this work, we address these issues, and introduce the Self Aware Object Detection (SAOD) task, a unified testing framework which respects and adheres to the challenges that object detectors face in safety-critical environments such as autonomous driving. Specifically, the SAOD task requires an object detector to be: robust to domain shift; obtain reliable uncertainty estimates for the entire scene; and provide calibrated confidence scores for the detections. We extensively use our framework, which introduces novel metrics and large scale test datasets, to test numerous object detectors in two different use-cases, allowing us to highlight critical insights into their robustness performance. Finally, we introduce a simple baseline for the SAOD task, enabling researchers to benchmark future proposed methods and move towards robust object detectors which are fit for purpose. Code is available at: https://github.com/fiveai/saod