Poster
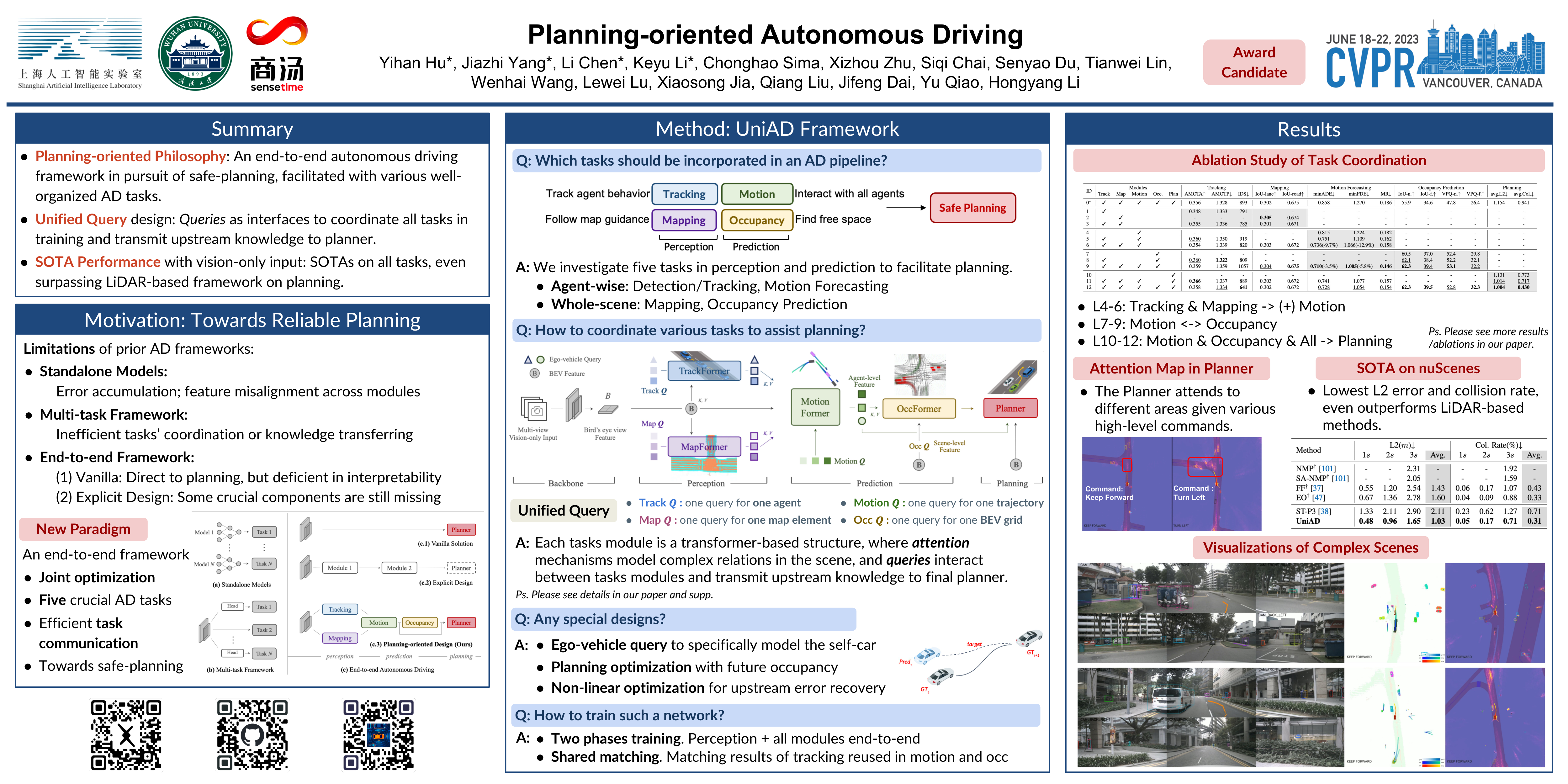
Planning-Oriented Autonomous Driving
Yihan Hu · Jiazhi Yang · Li Chen · Keyu Li · Chonghao Sima · Xizhou Zhu · Siqi Chai · Senyao Du · Tianwei Lin · Wenhai Wang · Lewei Lu · Xiaosong Jia · Qiang Liu · Jifeng Dai · Yu Qiao · Hongyang Li
West Building Exhibit Halls ABC 131

{kind=link}
Modern autonomous driving system is characterized as modular tasks in sequential order, i.e., perception, prediction, and planning. In order to perform a wide diversity of tasks and achieve advanced-level intelligence, contemporary approaches either deploy standalone models for individual tasks, or design a multi-task paradigm with separate heads. However, they might suffer from accumulative errors or deficient task coordination. Instead, we argue that a favorable framework should be devised and optimized in pursuit of the ultimate goal, i.e., planning of the self-driving car. Oriented at this, we revisit the key components within perception and prediction, and prioritize the tasks such that all these tasks contribute to planning. We introduce Unified Autonomous Driving (UniAD), a comprehensive framework up-to-date that incorporates full-stack driving tasks in one network. It is exquisitely devised to leverage advantages of each module, and provide complementary feature abstractions for agent interaction from a global perspective. Tasks are communicated with unified query interfaces to facilitate each other toward planning. We instantiate UniAD on the challenging nuScenes benchmark. With extensive ablations, the effectiveness of using such a philosophy is proven by substantially outperforming previous state-of-the-arts in all aspects. Code and models are public.