Poster
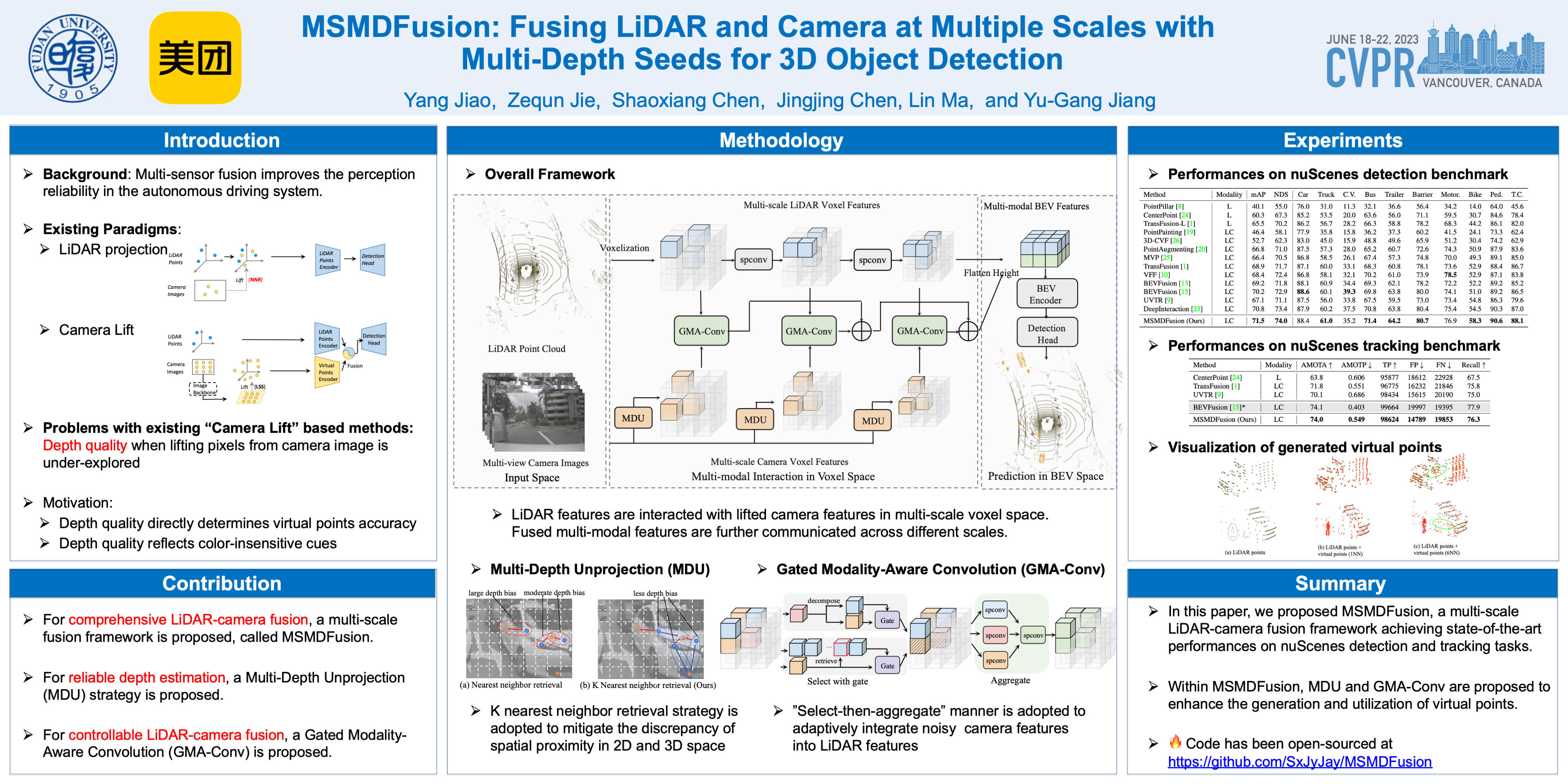
MSMDFusion: Fusing LiDAR and Camera at Multiple Scales With Multi-Depth Seeds for 3D Object Detection
Yang Jiao · Zequn Jie · Shaoxiang Chen · Jingjing Chen · Lin Ma · Yu-Gang Jiang
West Building Exhibit Halls ABC 099
{kind=link}
Fusing LiDAR and camera information is essential for accurate and reliable 3D object detection in autonomous driving systems. This is challenging due to the difficulty of combining multi-granularity geometric and semantic features from two drastically different modalities. Recent approaches aim at exploring the semantic densities of camera features through lifting points in 2D camera images (referred to as “seeds”) into 3D space, and then incorporate 2D semantics via cross-modal interaction or fusion techniques. However, depth information is under-investigated in these approaches when lifting points into 3D space, thus 2D semantics can not be reliably fused with 3D points. Moreover, their multi-modal fusion strategy, which is implemented as concatenation or attention, either can not effectively fuse 2D and 3D information or is unable to perform fine-grained interactions in the voxel space. To this end, we propose a novel framework with better utilization of the depth information and fine-grained cross-modal interaction between LiDAR and camera, which consists of two important components. First, a Multi-Depth Unprojection (MDU) method is used to enhance the depth quality of the lifted points at each interaction level. Second, a Gated Modality-Aware Convolution (GMA-Conv) block is applied to modulate voxels involved with the camera modality in a fine-grained manner and then aggregate multi-modal features into a unified space. Together they provide the detection head with more comprehensive features from LiDAR and camera. On the nuScenes test benchmark, our proposed method, abbreviated as MSMDFusion, achieves state-of-the-art results on both 3D object detection and tracking tasks without using test-time-augmentation and ensemble techniques. The code is available at https://github.com/SxJyJay/MSMDFusion.