Poster
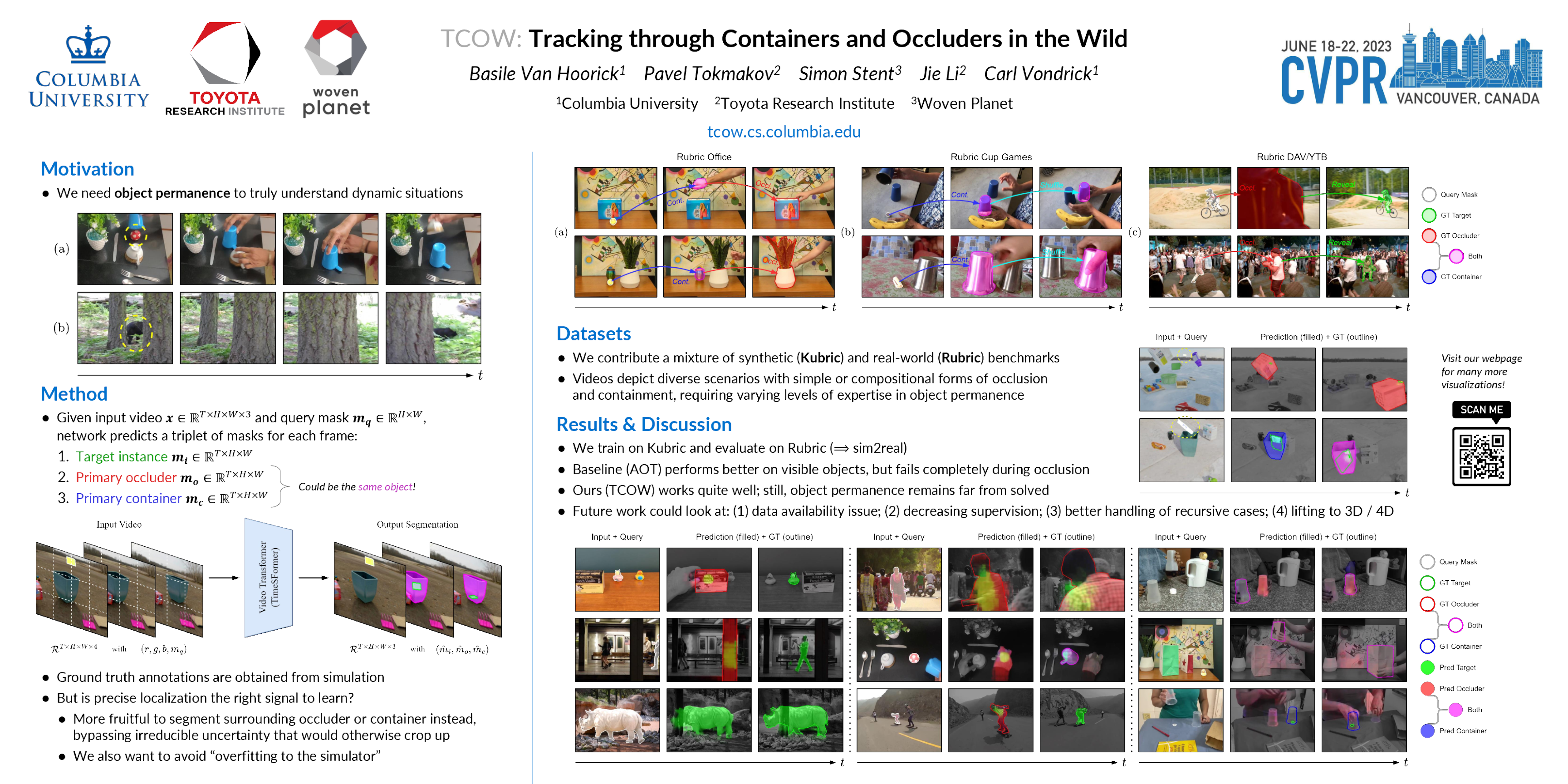
Tracking Through Containers and Occluders in the Wild
Basile Van Hoorick · Pavel Tokmakov · Simon Stent · Jie Li · Carl Vondrick
West Building Exhibit Halls ABC 138
{kind=link}
Tracking objects with persistence in cluttered and dynamic environments remains a difficult challenge for computer vision systems. In this paper, we introduce TCOW, a new benchmark and model for visual tracking through heavy occlusion and containment. We set up a task where the goal is to, given a video sequence, segment both the projected extent of the target object, as well as the surrounding container or occluder whenever one exists. To study this task, we create a mixture of synthetic and annotated real datasets to support both supervised learning and structured evaluation of model performance under various forms of task variation, such as moving or nested containment. We evaluate two recent transformer-based video models and find that while they can be surprisingly capable of tracking targets under certain settings of task variation, there remains a considerable performance gap before we can claim a tracking model to have acquired a true notion of object permanence.