{kind=link}
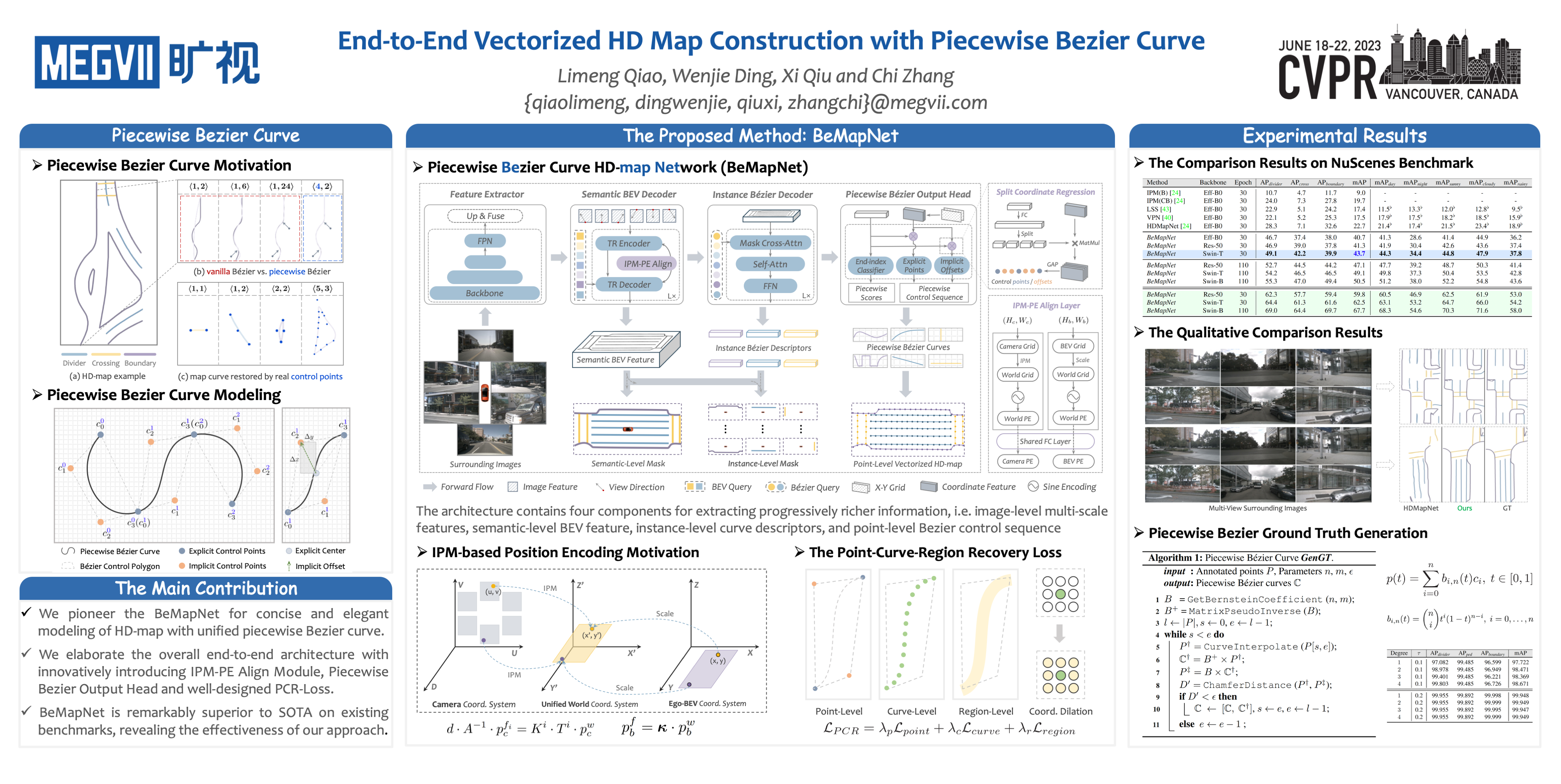
Vectorized high-definition map (HD-map) construction, which focuses on the perception of centimeter-level environmental information, has attracted significant research interest in the autonomous driving community. Most existing approaches first obtain rasterized map with the segmentation-based pipeline and then conduct heavy post-processing for downstream-friendly vectorization. In this paper, by delving into parameterization-based methods, we pioneer a concise and elegant scheme that adopts unified piecewise Bezier curve. In order to vectorize changeful map elements end-to-end, we elaborate a simple yet effective architecture, named Piecewise Bezier HD-map Network (BeMapNet), which is formulated as a direct set prediction paradigm and postprocessing-free. Concretely, we first introduce a novel IPM-PE Align module to inject 3D geometry prior into BEV features through common position encoding in Transformer. Then a well-designed Piecewise Bezier Head is proposed to output the details of each map element, including the coordinate of control points and the segment number of curves. In addition, based on the progressively restoration of Bezier curve, we also present an efficient Point-Curve-Region Loss for supervising more robust and precise HD-map modeling. Extensive comparisons show that our method is remarkably superior to other existing SOTAs by 18.0 mAP at least.