Poster
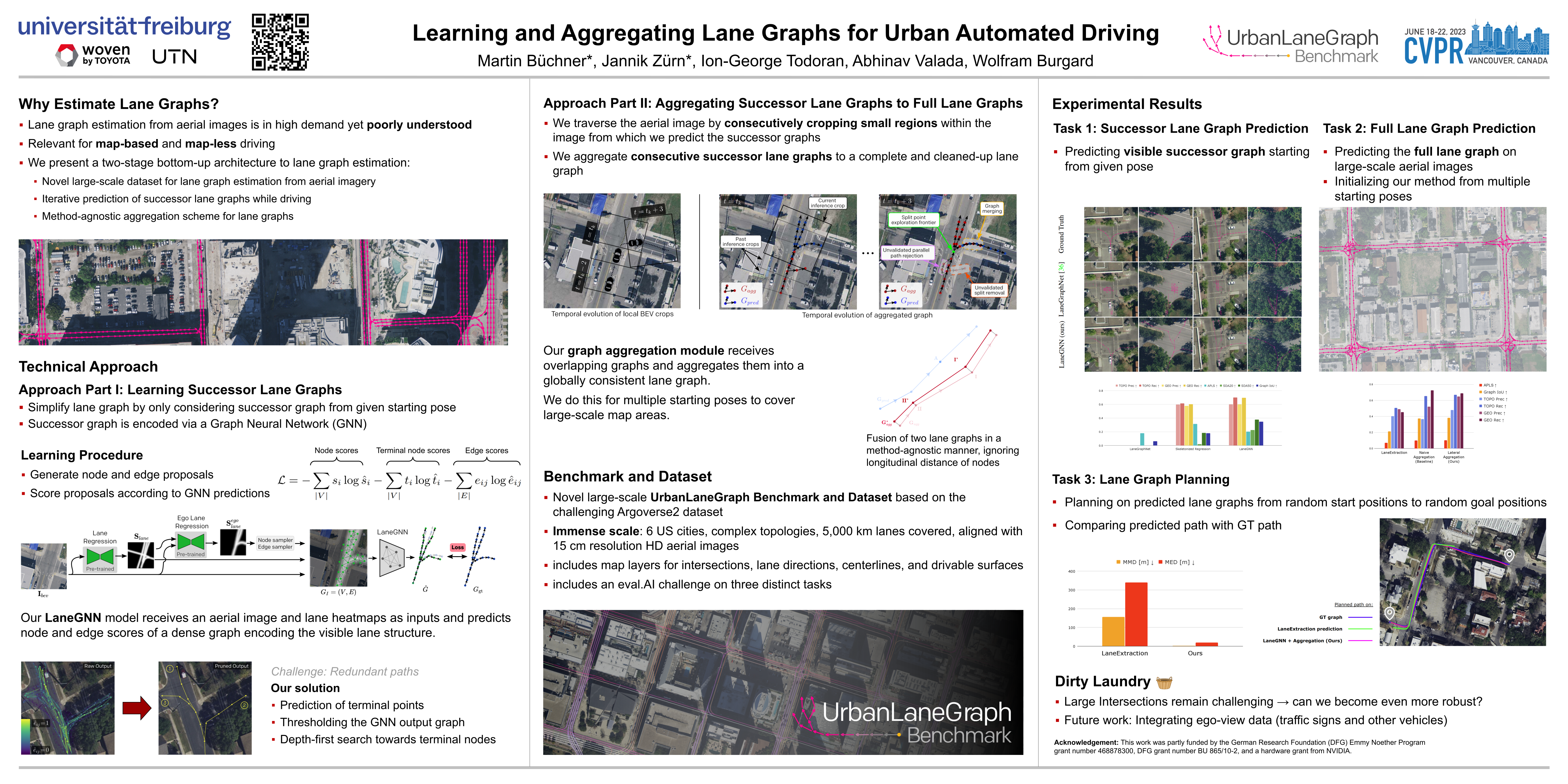
Learning and Aggregating Lane Graphs for Urban Automated Driving
Martin Büchner · Jannik Zürn · Ion-George Todoran · Abhinav Valada · Wolfram Burgard
West Building Exhibit Halls ABC 101
{kind=link}
Lane graph estimation is an essential and highly challenging task in automated driving and HD map learning. Existing methods using either onboard or aerial imagery struggle with complex lane topologies, out-of-distribution scenarios, or significant occlusions in the image space. Moreover, merging overlapping lane graphs to obtain consistent largescale graphs remains difficult. To overcome these challenges, we propose a novel bottom-up approach to lane graph estimation from aerial imagery that aggregates multiple overlapping graphs into a single consistent graph. Due to its modular design, our method allows us to address two complementary tasks: predicting ego-respective successor lane graphs from arbitrary vehicle positions using a graph neural network and aggregating these predictions into a consistent global lane graph. Extensive experiments on a large-scale lane graph dataset demonstrate that our approach yields highly accurate lane graphs, even in regions with severe occlusions. The presented approach to graph aggregation proves to eliminate inconsistent predictions while increasing the overall graph quality. We make our large-scale urban lane graph dataset and code publicly available at http://urbanlanegraph.cs.uni-freiburg.de.