{kind=link}
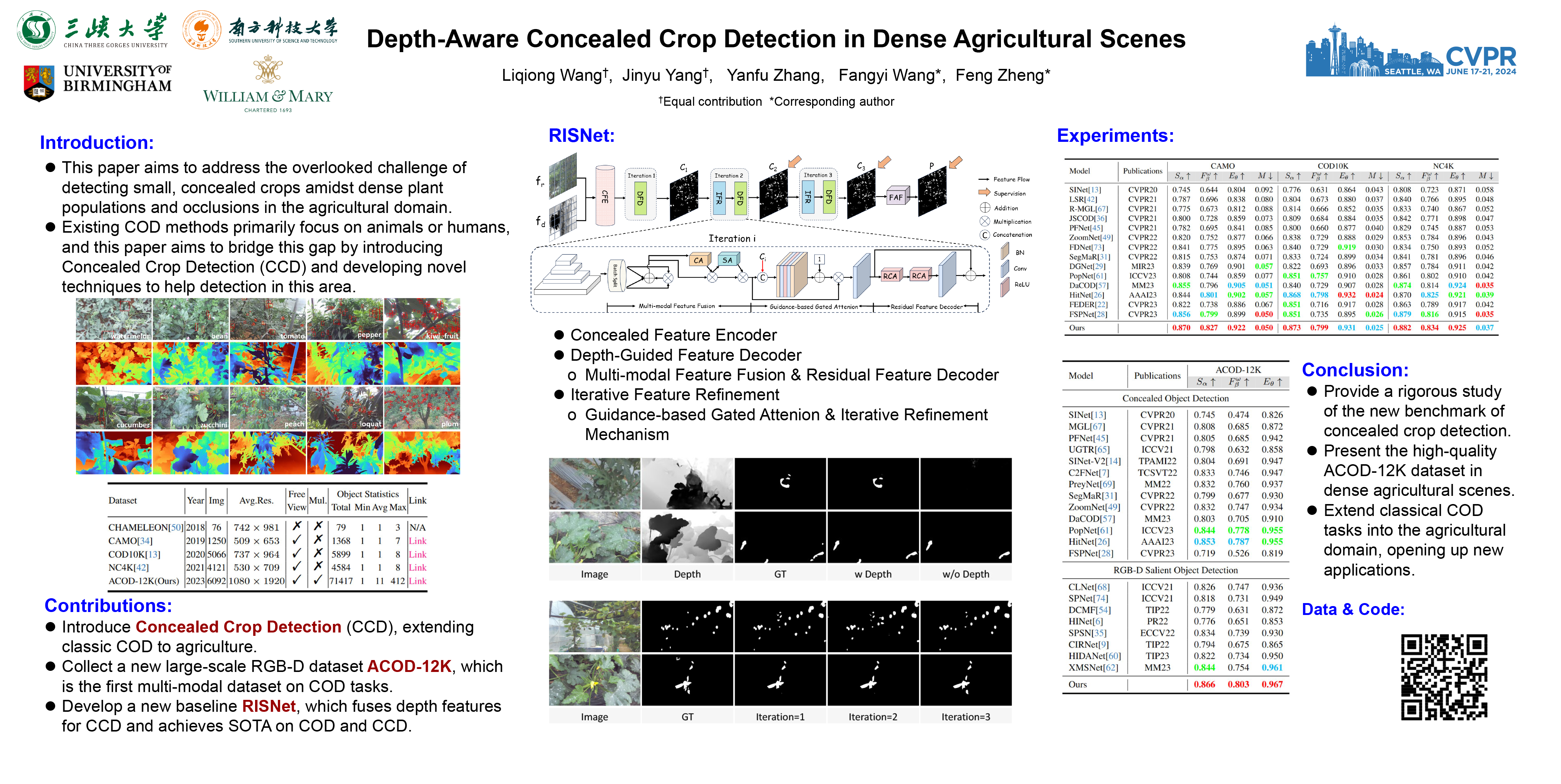
Concealed Object Detection (COD) aims to identify objects visually embedded in their background. Existing COD datasets and methods predominantly focus on animals or humans, ignoring the agricultural domain, which often contains numerous, small, and concealed crops with severe occlusions.In this paper, we introduce Concealed Crop Detection (CCD), which extends classic COD to agricultural domains.Experimental study shows that unimodal data provides insufficient information for CCD.To address this gap, we first collect a large-scale RGB-D dataset, ACOD-12K, containing high-resolution crop images and depth maps.Then, we propose a foundational framework named Recurrent Iterative Segmentation Network (RISNet).To tackle the challenge of dense objects, we employ multi-scale receptive fields to capture objects of varying sizes, thus enhancing the detection performance for dense objects.By fusing depth features, our method can acquire spatial information about concealed objects to mitigate disturbances caused by intricate backgrounds and occlusions. Furthermore, our model adopts a multi-stage iterative approach, using predictions from each stage as gate attention to reinforce position information, thereby improving the detection accuracy for small objects. Extensive experimental results demonstrate that our RISNet achieves new state-of-the-art performance on both newly proposed CCD and classic COD tasks.All resources will be available at https://github.com/Kki2Eve/RISNet.