Poster
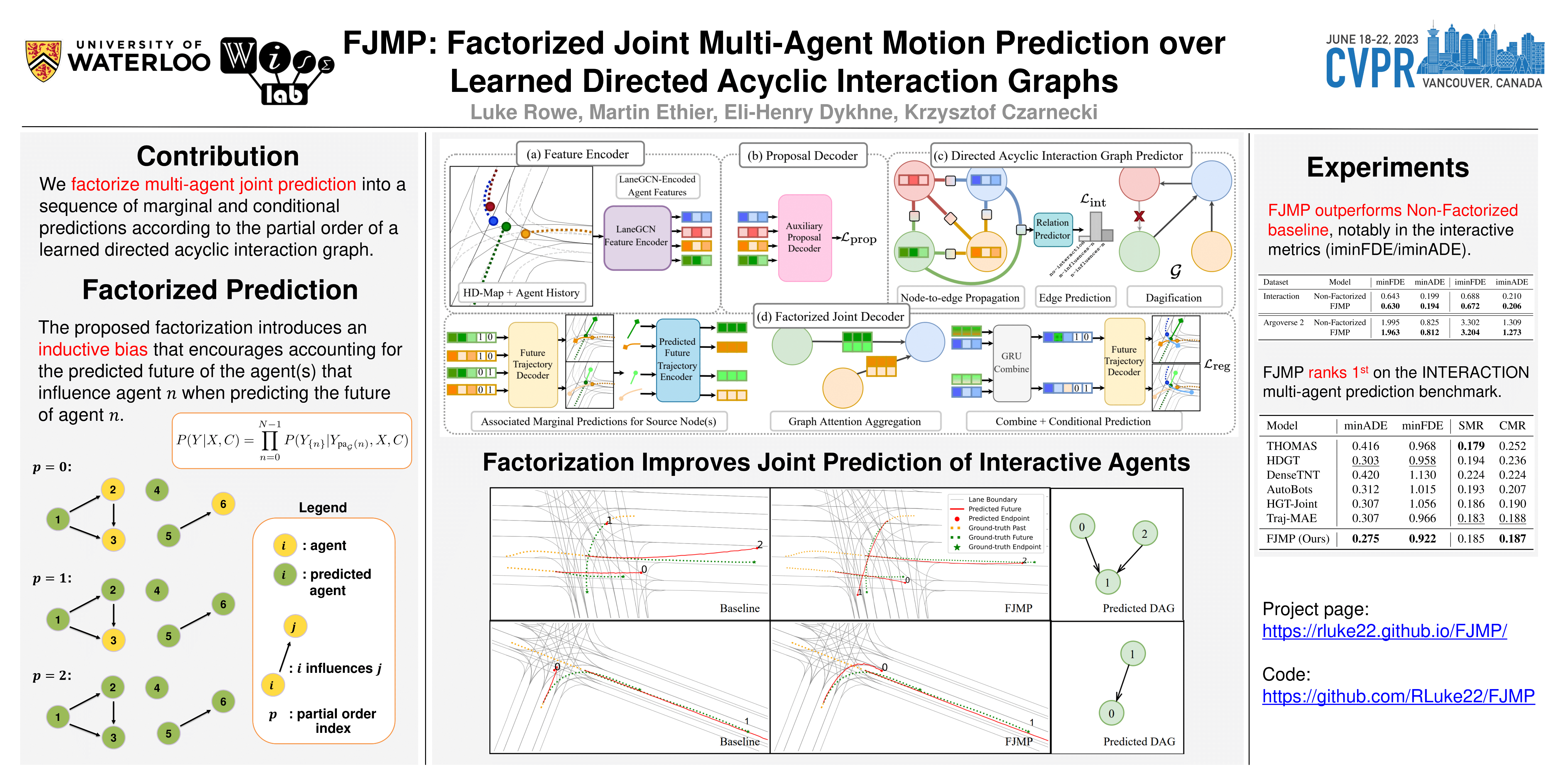
FJMP: Factorized Joint Multi-Agent Motion Prediction Over Learned Directed Acyclic Interaction Graphs
Luke Rowe · Martin Ethier · Eli-Henry Dykhne · Krzysztof Czarnecki
West Building Exhibit Halls ABC 133
{kind=link}
Predicting the future motion of road agents is a critical task in an autonomous driving pipeline. In this work, we address the problem of generating a set of scene-level, or joint, future trajectory predictions in multi-agent driving scenarios. To this end, we propose FJMP, a Factorized Joint Motion Prediction framework for multi-agent interactive driving scenarios. FJMP models the future scene interaction dynamics as a sparse directed interaction graph, where edges denote explicit interactions between agents. We then prune the graph into a directed acyclic graph (DAG) and decompose the joint prediction task into a sequence of marginal and conditional predictions according to the partial ordering of the DAG, where joint future trajectories are decoded using a directed acyclic graph neural network (DAGNN). We conduct experiments on the INTERACTION and Argoverse 2 datasets and demonstrate that FJMP produces more accurate and scene-consistent joint trajectory predictions than non-factorized approaches, especially on the most interactive and kinematically interesting agents. FJMP ranks 1st on the multi-agent test leaderboard of the INTERACTION dataset.