{kind=link}
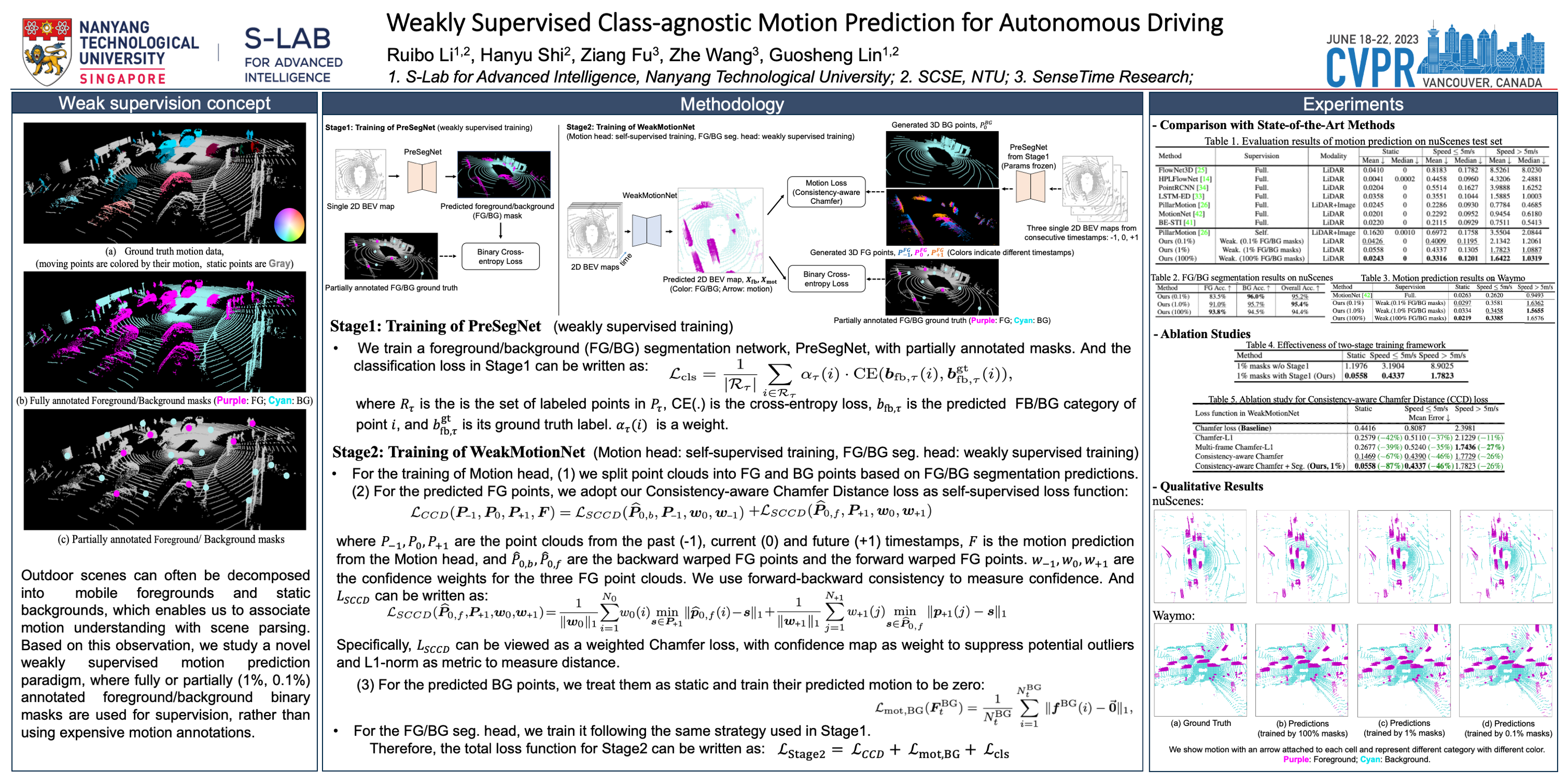
Understanding the motion behavior of dynamic environments is vital for autonomous driving, leading to increasing attention in class-agnostic motion prediction in LiDAR point clouds. Outdoor scenes can often be decomposed into mobile foregrounds and static backgrounds, which enables us to associate motion understanding with scene parsing. Based on this observation, we study a novel weakly supervised motion prediction paradigm, where fully or partially (1%, 0.1%) annotated foreground/background binary masks rather than expensive motion annotations are used for supervision. To this end, we propose a two-stage weakly supervised approach, where the segmentation model trained with the incomplete binary masks in Stage1 will facilitate the self-supervised learning of the motion prediction network in Stage2 by estimating possible moving foregrounds in advance. Furthermore, for robust self-supervised motion learning, we design a Consistency-aware Chamfer Distance loss by exploiting multi-frame information and explicitly suppressing potential outliers. Comprehensive experiments show that, with fully or partially binary masks as supervision, our weakly supervised models surpass the self-supervised models by a large margin and perform on par with some supervised ones. This further demonstrates that our approach achieves a good compromise between annotation effort and performance.